
Innovative electromagnetic simulation software and exceptional support to reduce the time and cost of delivering your devices to market.
Remcom Software
Remcom’s products are designed to work together to provide complete and accurate results.
-
XFdtd®
3D Electromagnetic Simulation Software -
Wireless InSite®
3D Wireless Prediction Software -
WaveFarer®
Radar Simulation Software -
XGtd®
Far Zone Radiation, RCS, and EMI/EMC for Electrically-Large Platforms
-
XFdtd® 3D Electromagnetic Simulation Software
XFdtd 3D EM Simulation Software provides engineers with powerful tools to shorten development time and release products to market sooner. A full-featured electromagnetic simulation solver, XFdtd outpaces other methods in efficiency as the number of unknowns increases.
Learn More About XFdtd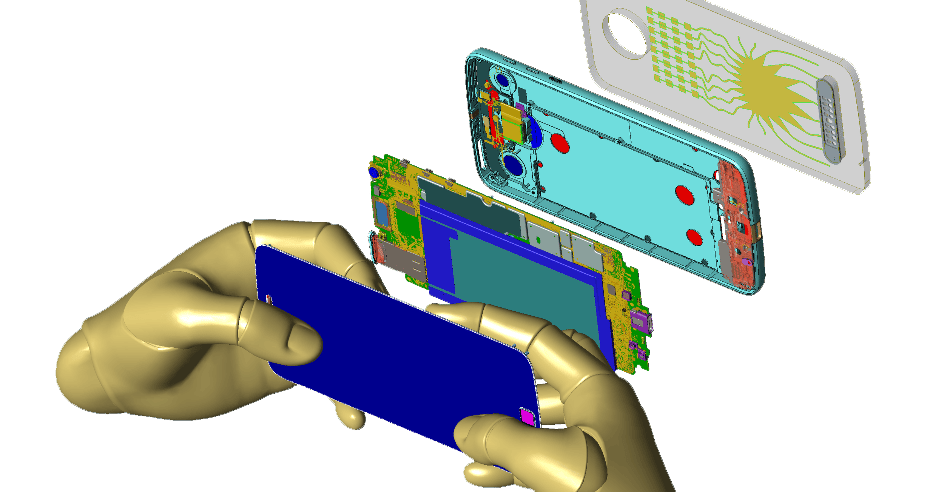
-
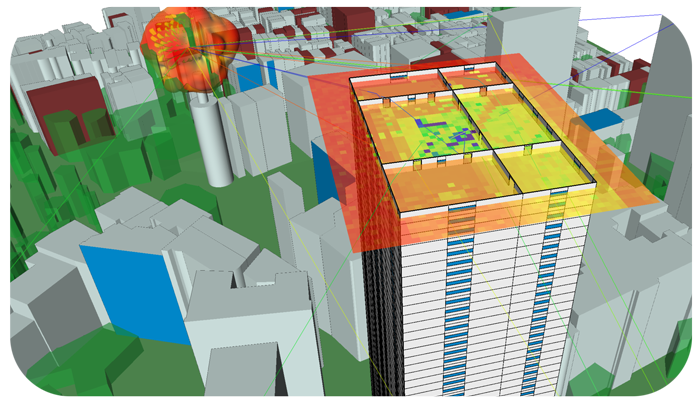
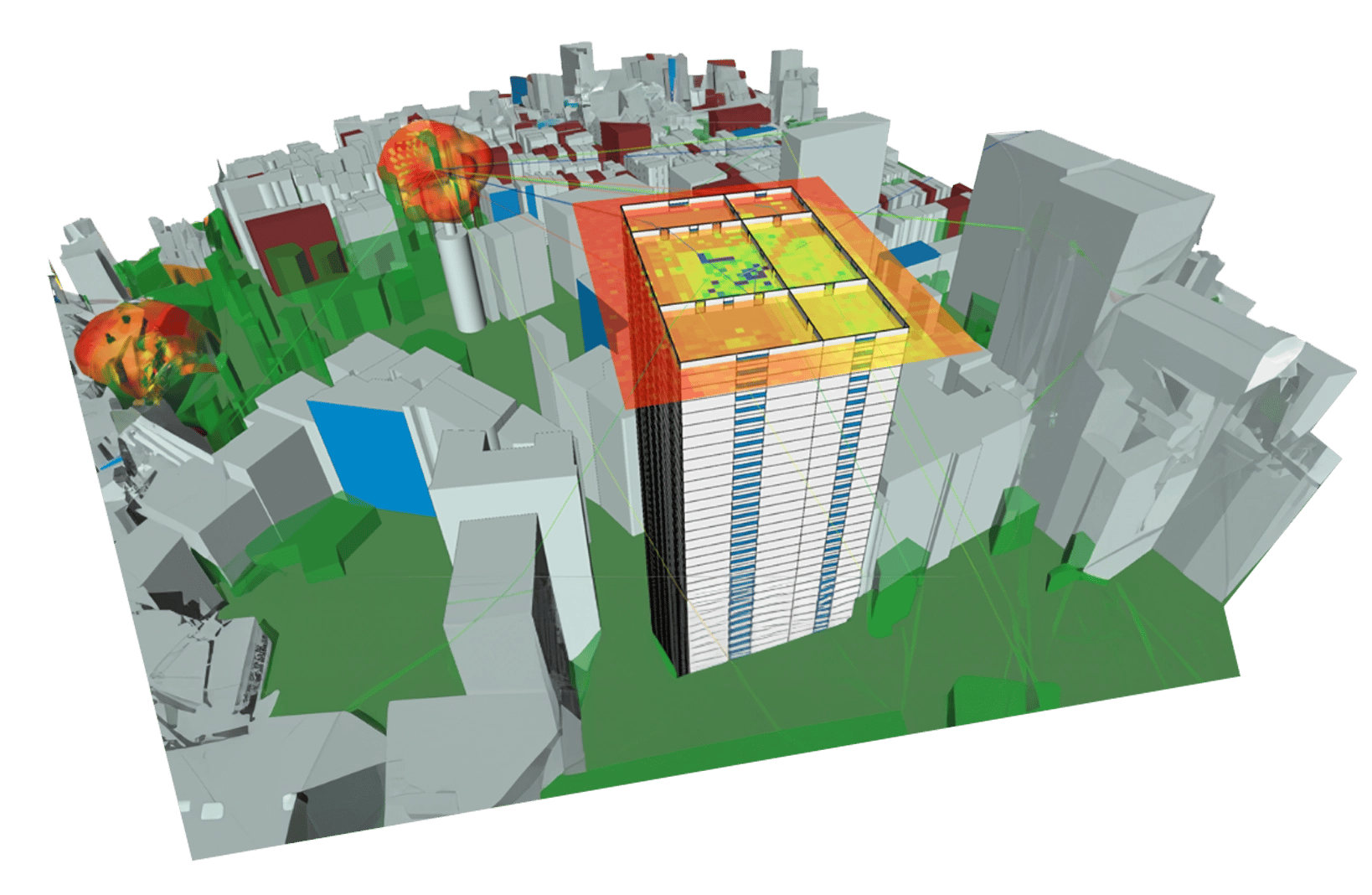
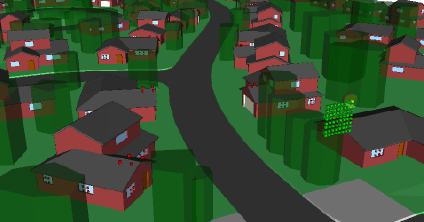
Wireless InSite® 3D Wireless Prediction Software
Wireless InSite is a suite of RF propagation models, providing 3D ray-tracing, fast ray-based methods, and empirical models for the analysis of site-specific radio wave propagation and wireless communication systems. Through its combined modeling, simulation, and post-processing capabilities, it provides efficient and accurate predictions of EM propagation and communication channel characteristics in complex urban, indoor, rural and mixed path environments.
Learn More About Wireless InSite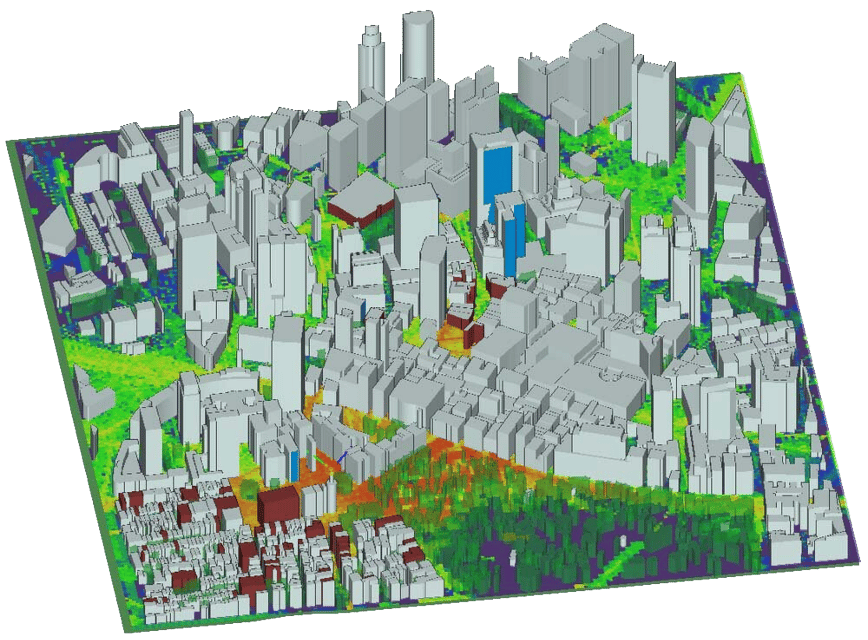
-
WaveFarer® Radar Simulation Software
WaveFarer is a high fidelity radar simulator that accounts for multipath and scattering from structures and vehicles in the immediate environment of a radar system as well as key atmospheric and scattering effects for frequencies up to and beyond 100 GHz. Applications include simulation of automotive drive scenarios, indoor sensors, and far field radar cross section (RCS).
Learn More About WaveFarer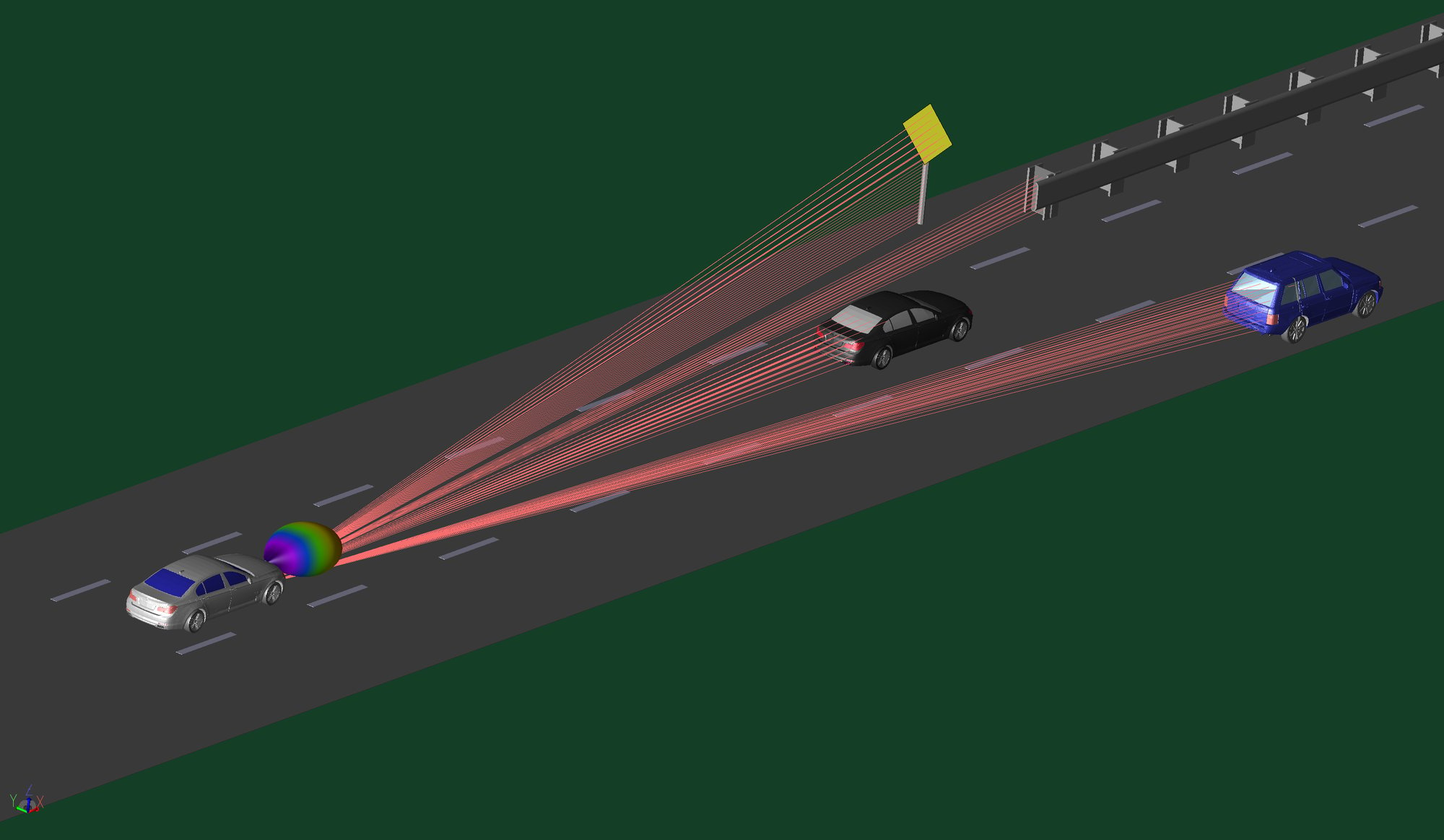
-
XGtd® Far Zone Radiation, RCS, and EMI/EMC for Electrically-Large Platforms
XGtd is a ray-based electromagnetic analysis tool for assessing the effects of a vehicle or vessel on antenna radiation, predicting coupling between antennas, and predicting radar cross section (RCS). It is ideally suited for applications with higher frequencies or very large platforms where the requirements of a full physics method may exceed available computational resources.
Learn More About XGtd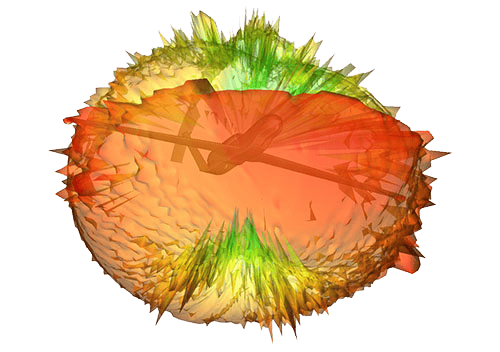
5G MIMO
Remcom’s EM simulation software provides a complete 5G solution, from system and MIMO antenna design through performance assessment in realistic, simulated environments, and planning for deployment in 5G networks. Our mission is to provide accurate solutions so customers can reliably predict how their systems will behave in the real world.
5G MIMO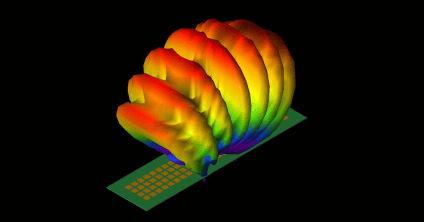
Antenna Design
Antenna technology is constantly advancing to meet the growing demands of industry. Likewise, Remcom has been keeping pace in order to provide engineers with antenna simulation software that matches their processes and helps them meet their device design requirements.
Antenna Design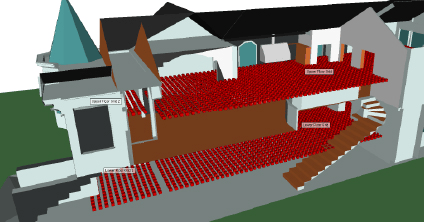
Antenna Placement
Remcom’s antenna modeling software tools ensure proper design and placement of antennas in almost any application. Our simulation tools can work alone or together for a complete analysis of how an antenna will perform.
Antenna Placement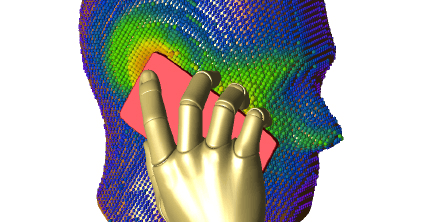
Mobile Device
Precision is key when designing today’s complex mobile devices, and engineers can’t afford discrepancies between device efficiency and simulation results. Remcom users see less than a 0.5 dB difference in device efficiency when compared to electromagnetic simulation results.
Mobile Device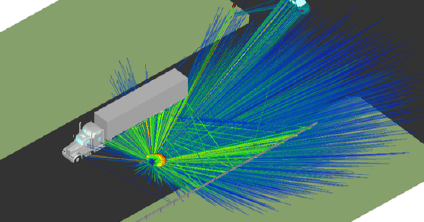
Automotive Radar
Simulation technology has advanced to meet more stringent design requirements for 24 GHz and 77 GHz automotive radar sensors including blind spot detection (BSD) and lane change assistance (LCA). Remcom offers an integrated approach from sensor design to drive test scenarios.
Automotive Radar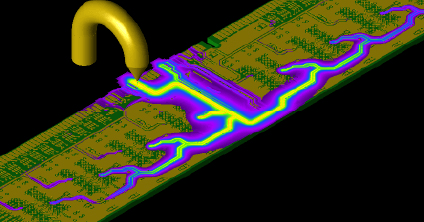
ESD Testing
Utilizing XFdtd's electrostatic discharge testing simulations allows engineers to pinpoint locations susceptible to ESD damage and optimize ESD mitigation during the concept and design stage of product development.
ESD Testing
An Enjoyable Business Collaboration — it’s just as important as the software you choose.





Save time and reduce costs.
Contact Remcom today for a customized solution to your most complex electromagnetic challenges.
Request a Quote